AMF-SLAM: 3D Simultaneous Localisation and Mapping with Power Network Electromagnetic Radiation
Synopsis
This invention presents an alternating magnetic field (AMF)-based orientation-aware 3D simultaneous localisation and mapping (SLAM) algorithm, using low-frequency magnetism from indoor powerlines to construct an AMF map in 3D space. This 3D AMF sensing technology has wide applications, including indoor mapping and localisation, facility layout planning and human AMF exposure monitoring.
Opportunity
New sensing modalities for indoor localisation are a significant research interest. Traditional modalities like vision, Wi-Fi, geomagnetic field (GMF) and lidar have limitations under certain conditions. Visual sensing struggles with poor illumination, Wi-Fi signals can be affected by multipath fading and lidar can be obstructed by glass walls. This invention pertains to research exploring the novel sensing modality of AMF generated by powerlines. The AMF-SLAM algorithm, using a new triaxial AMF sensor, provides accurate and reliable indoor 3D mapping and localisation, overcoming the limitations of other modalities. This technology also enhances facility layout planning, public health assessments and power infrastructure monitoring.
Technology
The AMF-SLAM algorithm integrates a triaxial AMF sensor with a mobile platform to collect powerline AMF signals in 3D indoor environments. The GraphSLAM component reconstructs the mobile’s trajectory and generates the 3D AMF map using three key modules: loop closure detection, graph construction and graph optimisation. The loop closure detection module identifies revisited locations based on AMF intensity, rectifying long-run odometry drifts. The graph construction module builds the graph structure using kinematic and Gaussian Process (GP) models on odometry and AMF data. The graph optimisation module finds the optimal graph by minimising the cost defined from the models and loop closures. The AMF map is formed by tagging AMF intensity data onto the reconstructed trajectory and updating GP posteriors for unvisited locations. This approach achieves sub-1m to 3m median localisation errors and outperforms traditional SLAM systems.
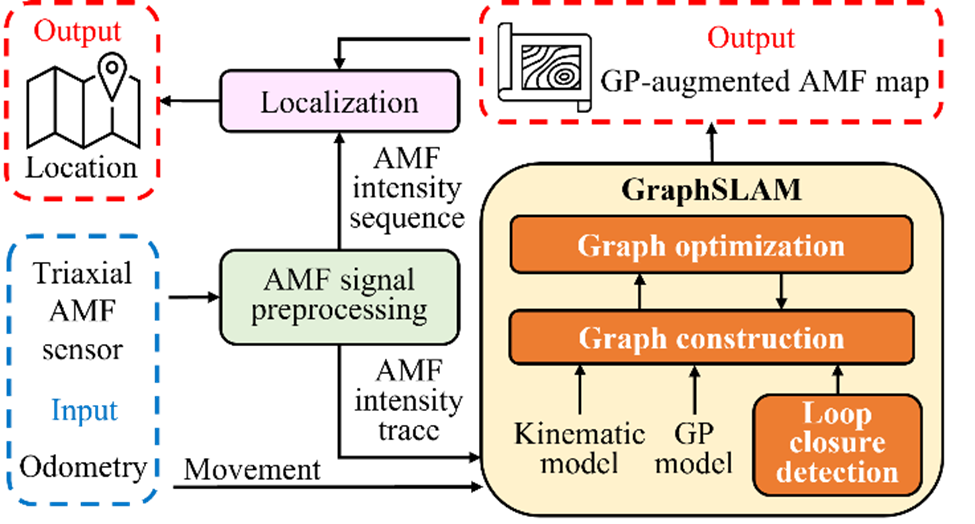
Figure 1: System overview of 3D AMF-SLAM.
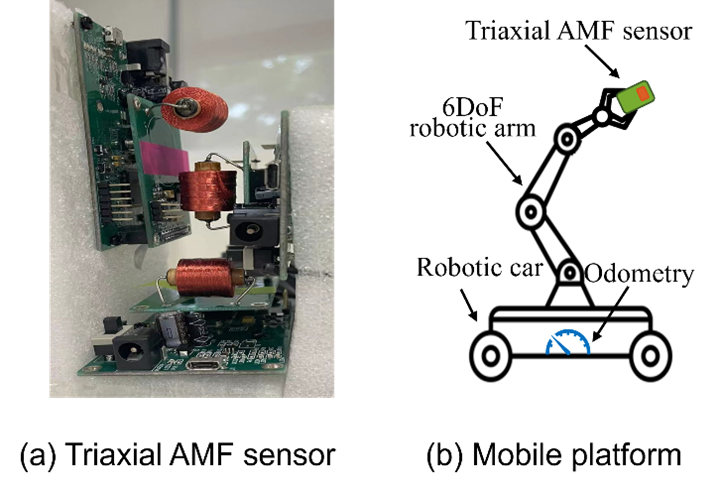
Figure 2: AMF sensor and mobile platform setup: (a) triaxial AMF sensor; (b) mobile platform.
Applications & Advantages
Applications:
- Enhanced indoor 3D mapping and localisation for navigation.
- Facility layout planning optimisation.
- Public health assessments through better understanding of indoor environments.
Advantages:
- Utilises low-frequency AMF from indoor powerlines.
- Triaxial AMF sensor’s orientation estimation avoids error accumulation faced by inertial sensing.
- Robust map construction tolerant to trajectory deviations.
- Achieves sub-1m to 3m median localisation errors in eight evaluated indoor spaces of up to 500m2, and sub-2° mean orientation errors, outperforming Wi-Fi, GMF, and uniaxial AMF SLAM systems by over 30%.

.tmb-listing.jpg?Culture=en&sfvrsn=3b74ec1c_1)